
Ремонт АОГВ Жуковский. Инструкции. Неисправности. Запчасти.
Ремонт АОГВ Жуковский. Неисправности. Инструкции.
Стук в газовом котле АОГВ при нагревании
Вопрос о стуках в АОГВ, причем, о стуках довольно сильных весьма редко встречался в моей практике, но тем не менее…
08.02.2022
Замена неисправного регулятора температуры для газового клапана Honeywell (Mertik Maxitroll)
Возможно, что Вы здесь именно по потому, что Ваш котел с блоком Honeywell (он же Mertik Maxitroll) не выключается при…
08.02.2022
Неисправности автоматики по тяге и перегреву для котлов АОГВ Комфорт, Mertik, Honeywell, Eurosit и ее замена
В продолжении наших изысканий и предположений по теме “Котел с блоком Honeywell сам выключается, без видимых причин”, которые были изложены…
08.02.2022
Сложности при закреплении блока автоматики АОГВ Эконом к котлу
У меня как-то был интересный вызов, – надо было “перебрать”(отремонтировать) блок Эконом.
08.02.2022
Заклинивание ручки регулятора температуры в блоке Эконом АОГВ ЖМЗ
Для любого котла с блоком автоматики Эконом, который никто не трогал лет 7-10-15, – это вполне нормальное и естественное явление.Симптомы:…
08.02.2022
Неисправность газовых котлов с газовым клапаном 820 Nova.
Неисправности газовых котлов с газовым клапаном 820 Nova. То что Вы найдете ниже актуально для всех моделей напольных газовых котлов…
08.02.2022
Неисправности АОГВ Жуковский с блоком Honeywell (Mertik) или Eurosit
Итак! У Вас газовый котел АОГВ Жуковский, а может быть и Боринский с газовым клапаном Honeywell или Eurosit 630. Ниже…
08.02.2022
Неисправности узла сильфона-термобаллона АОГВ Эконом Жуковский
Узел сильфона-термобаллона предназначен для закрытия газа на основную горелку при наборе котлом назначенной температуры.
08.02.2022
Кнопку электромагнитного клапана приходится зажимать
Ситуация следующая. Котел работает только тогда, когда кнопка находится в нажатом положении. Во многих случаях все сразу думают, что неисправен…
08.02.2022
Запах газа от газового клапана АОГВ Эконом Жуковский
1. Запах газа от газового клапана. Подразумевается газовый клапан для газовых котлов Эконом ЖМЗ. Причина: Износ прокладок или уплотнений внутри…
08.02.2022
Как заменить термопару в АОГВ Жуковский? Пример на АОГВ-11,6 Эконом 2007 г.
Стоит заметить, что тестер при диагностике термопар любых газовых котлов – вещь необходимая. Запомните! Когда “мастер” приходит без тестера, можно…
Ремонт газового клапана АОГВ Эконом Жуковский. Полная переборка.
Здесь Вас ждет полное описание переборки газового клапана Эконом для газового котла АОГВ Жуковский. И во всей последующей нашей с…
И во всей последующей нашей с…
08.02.2022
Замена электромагнитного клапана на АОГВ Эконом ЖМЗ
Электромагнитный клапан в рабочем положении удерживается ЭДС(электро-движущая сила, 20-25 mV), которую вырабатывает термопара. Это не клапан неисправен, если все работало…
08.02.2022
Замена турбуляторов в котле АОГВ Жуковский
Турбуляторы – это такие, винтом скрученные железки, которые обеспечивают КПД нашего котла. Со временем они прогорают практически до самого верха….
08.02.2022
Установка термометра в котел АОГВ Эконом
Отверстие для термометра-градусника расположено рядом с термопластиной (плохая тяга). Термометр устанавливается так. Отверстие заполняется маслом для наилучшей теплопередачи. Затем необходимо…
08.02.2022
Регулировка или ремонт датчика тяги (термопластины) АОГВ Эконом
У электромагнитного клапана (магнитной коробки), как мы видим, два контакта. Смотрим общее описание оснастки клапана. Это контакты 2 и 3….
Смотрим общее описание оснастки клапана. Это контакты 2 и 3….
08.02.2022
Температура АОГВ-11,6 Эконом не регулируется.
Здесь речь пойдет о замене так называемого регулятора температуры для котлов АОГВ Жуковский. В этой статье мы покажем замену узла…
07.02.2022
Неисправность термопары АОГВ Эконом. Как проверить термопару?
Речь в этой статье пойдет о работе газовых котлов АОГВ Жуковский. Если у Вас установлен газовый котел с энергонезависимой автоматикой…
07.02.2022
Газовый котел АОГВ Эконом не включается. Три основные неисправности.
Когда котел АОГВ Эконом не включается, обычно перед глазами стоит вот такая картина, как на первом фото. Кнопка электромагнитного клапана…
03.02.2022
Укладка контейнеров UR10 — документация Omniverse Robotics
В этом учебном пособии рассматривается полное приложение для штабелирования контейнеров с использованием робота UR10. В этом
Например, мы используем предварительно разработанную среду USD, содержащую конвейерную ленту, поддон, на котором находятся контейнеры.
должны быть уложены друг на друга, и робот UR10 с вакуумным захватом. Наше приложение не добавляет в сцену
(кроме невидимых препятствий для столкновения) и вместо этого контролирует существующие элементы USD в
предварительно разработанная среда USD.
В этом
Например, мы используем предварительно разработанную среду USD, содержащую конвейерную ленту, поддон, на котором находятся контейнеры.
должны быть уложены друг на друга, и робот UR10 с вакуумным захватом. Наше приложение не добавляет в сцену
(кроме невидимых препятствий для столкновения) и вместо этого контролирует существующие элементы USD в
предварительно разработанная среда USD.
Для краткости мы используем аббревиатуру isaac_python для скрипта Python Исаака Сима.
( ../../../python.sh
..\..\..\python.bat в Windows) и предположим, что рабочий
каталог standalone_examples/api/omni.isaac.cortex .Запустите следующую демонстрацию
isaac_python demo_ur10_conveyor_main.py
Нажмите кнопку воспроизведения, когда Исаак Сим запустится. Вы увидите, как работает демонстрация укладки контейнеров.
В этом учебном пособии будет показана демонстрация.
Робот UR10 с вакуумным захватом перемещает контейнеры с конвейера на поддон. Бункеры
должны быть сложены вверх дном, поэтому любая корзина, которая идет правильной стороной вверх, переворачивается при переворачивании
станция перед укладкой.
Бункеры
должны быть сложены вверх дном, поэтому любая корзина, которая идет правильной стороной вверх, переворачивается при переворачивании
станция перед укладкой.
В этой демонстрации используется неглубокая решающая сеть с диспетчерским узлом верхнего уровня, выбирающим между несколькими последовательные конечные автоматы.
Индивидуальные модели поведения демонстрируют общий метод программирования RMPflow, где области препятствий
автоматически включаются и выключаются стратегически, чтобы формировать поведение движения. Эти препятствия
регионы моделируются в сцене USD, но по умолчанию невидимы. Попробуйте переключить их видимость. Идти
до FlipStationSphere , NavigationDome , NavigationBarrier и NavigationFlipStation , чтобы увидеть их.
Поведение размещения корзины также использует реактивность RMPflow в сочетании с его подходом
параметры направления, чтобы создать поведение автоматической настройки для корректировки на лету для
несоответствие между ячейками.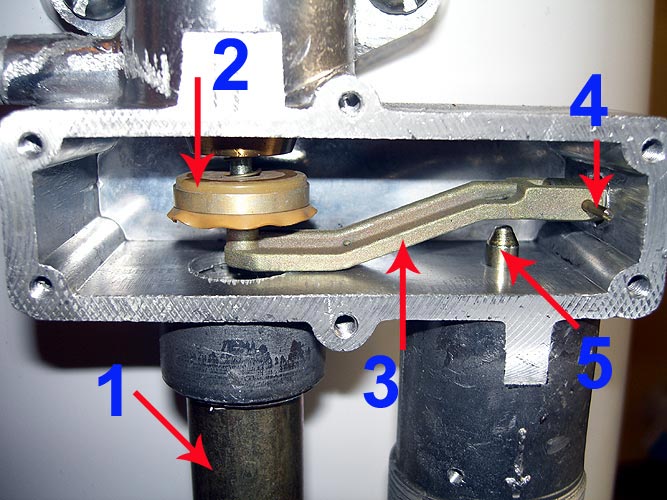
5.1. Диспетчеризация верхнего уровня
Точкой входа в решающую сеть является Узел Dispatch
DfNetwork — структура сети решающего устройства; ему передан корень (узел Dispatch ) и
объект контекста, который будет доступен в качестве члена в каждом узле принятия решения/состояния: def make_decider_network(robot):
вернуть DfNetwork (Dispatch (), контекст = BinStackingContext (робот))
Объект контекста предоставляет каждому узлу доступ к командному API робота, а также к любому логическому состоянию
извлекается его мониторами. Dispatch Логика решения () узла довольно проста, учитывая
логическое состояние.
класс Отправка (DfDecider):
защита __init__(сам):
супер().__инит__()
self.add_child("flip_bin", FlipBin())
self.add_child("pick_bin", PickBin())
self.add_child("place_bin", PlaceBin())
self.add_child("go_home", make_go_home())
self.
add_child("do_nothing", DfStateMachineDecider(DoNothing()))
определить (самостоятельно):
если self.context.stack_complete:
вернуть DfDecision("go_home")
если self.context.has_active_bin:
если не self.context.active_bin.is_attached:
вернуть DfDecision("pick_bin")
Элиф self.context.active_bin.needs_flip:
вернуть DfDecision ("flip_bin")
еще:
вернуть DfDecision("place_bin")
еще:
вернуть DfDecision("go_home")
Логическое состояние включает:
stack_complete: Отмечает, все ли ячейки находятся на поддоне.
active_bin: Корзина, которая в данный момент находится в игре. Корзина остается активной до тех пор, пока она не будет помещена на стек. Затем из бункеров в конце конвейера выбирается новый бункер.
active_bin.is_attached: Указывает, подключен ли активный бункер к исполнительному органу через всасывающий захват.

active_bin.needs_flip: Указывает, находится ли бункер, прикрепленный к рабочему органу, правой стороной вверх (нужно перевернуть) или вверх ногами (не нужно переворачивать).
Логика принятия решения становится простой: если стопка заполнена или активной корзины нет, возвращайтесь домой. В противном случае, если есть активный лоток, выберите лоток, если он еще не находится в захвате, и переверните его, если его нужно перевернуть. Затем поместите корзину в стопку. Решающие сети упрощают запись этого логика принятия решений в удобочитаемой форме.
5.3. Навигационные мониторы препятствий
Основным генератором движения для MotionCommander является RMPflow , который автоматически
избегать зарегистрированных препятствий. Однако бывают случаи, когда эти препятствия необходимо отключить, чтобы
включить взаимодействие. Например. в пути мы хотим избежать манипулируемого объекта как препятствия, но как только мы
там мы должны взять его.
ObstacleMonitor и ObstacleMonitorContext omni.isaac.cortex./omni/isaac/cortex/obstacle_monitor_context.py облегчить развитие препятствия
мониторы, которые автоматически включают и выключают препятствия в зависимости от запрограммированных условий. Взгляните на реализацию ObstacleMonitor в файле, указанном выше. На строительстве это
принимает набор препятствий, которые он будет отслеживать, а также объект контекста, и API требует
производные классы для реализации is_obstacle_required() для определения, когда препятствия должны быть
включается и отключается на основе информации, доступной из объекта контекста. Метод имеет доступ
в контексте как self.context аналогично решающим объектам / объектам состояния. API также предоставляет enable_autotoggle() и deactivate_autotoggle() для активации и деактивации монитора.
Когда он активен, он автоматически включает и отключает препятствия на основе истинного значения is_obstacle_required() . При деактивации препятствия будут отключены и останутся отключенными
пока монитор не будет активирован.
При деактивации препятствия будут отключены и останутся отключенными
пока монитор не будет активирован.
ObstacleMonitorContext — это удобный базовый класс, который добавляет monitor_obstacles логический
монитор состояния автоматически, поэтому производным классам нужно только добавить объекты монитора препятствий, используя add_obstacle_monitors() .
Объект BinStackingContext является производным от ObstacleMonitorContext и добавляет два препятствия
мониторы, которые он использует для формирования навигационного поведения при перемещении между поддоном и
конвейер и навигация вокруг станции переворачивания бункера при переворачивании бункера. Они построены
и добавлено в BinStackingContext конструктор:
класс BinStackingContext(ObstacleMonitorContext):
def __init__(я, робот):
супер().__инит__()
...
self.flip_station_obs_monitor = FlipStationObstacleMonitor(я)
self.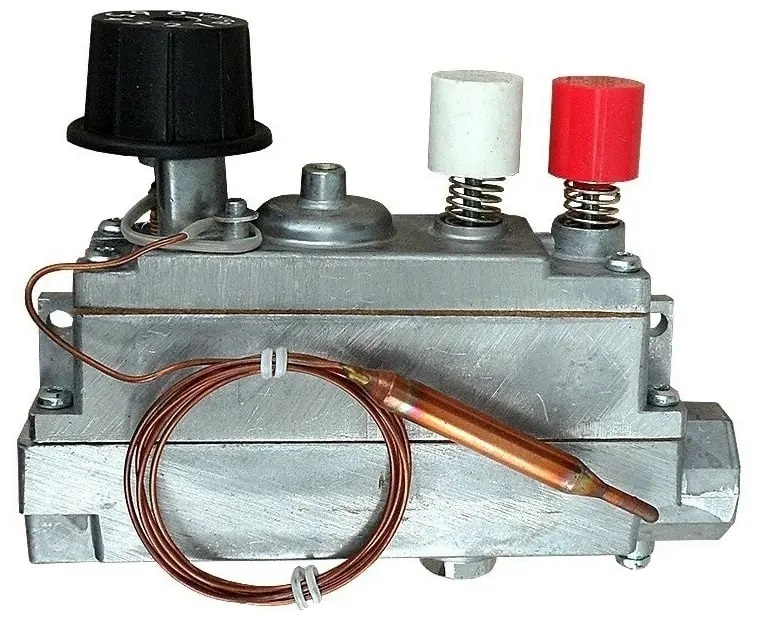 navigation_obs_monitor = NavigationObstacleMonitor(я)
self.add_obstacle_monitors([self.flip_station_obs_monitor, self.navigation_obs_monitor])
navigation_obs_monitor = NavigationObstacleMonitor(я)
self.add_obstacle_monitors([self.flip_station_obs_monitor, self.navigation_obs_monitor])
Оба монитора имеют простую логику:
class FlipStationObstacleMonitor(ObstacleMonitor):
def __init__(я, контекст):
super().__init__(контекст, [context.world.scene.get_object("flip_station_sphere")])
защита is_obstacle_required (я):
eff_T = self.context.robot.arm.get_fk_T()
eff_R, eff_p = math_util.unpack_T(eff_T)
eff_ax, _, _ = math_util.unpack_R(eff_R)
хватка_p = self.context.active_bin.grasp_T[:3, 3]
хватка_акс = self.context.active_bin.grasp_T[:3, 0]
v = eff_p - схватывание_p
расстояние = v.dot (хватка_ось)
orth_dist = np.linalg.norm (v - dist * схват_акс)
return not (расстояние <0,02 и хватка_ax.dot(eff_ax)> 0,75 и orth_dist <0,03)
класс NavigationObstacleMonitor(ObstacleMonitor):
def __init__(я, контекст):
препятствия = [
context. world.scene.get_object("navigation_dome_obs"),
context.world.scene.get_object("navigation_barrier_obs"),
context.world.scene.get_object("navigation_flip_station_obs"),
]
super().__init__(контекст, препятствия)
защита is_obstacle_required (я):
target_p, _ = self.context.robot.arm.target_prim.get_world_pose()
ref_p = np.array ([0,6, 0,37, -0,99])
eff_p = self.context.robot.arm.get_fk_p()
ref_p[2] = 0,0
eff_p[2] = 0,0
target_p[2] = 0,0
s_target = np.sign (np.cross (target_p, ref_p) [2])
s_eff = np.sign (np.cross (eff_p, ref_p) [2])
is_required = s_target * s_eff < 0,0
возврат is_required
world.scene.get_object("navigation_dome_obs"),
context.world.scene.get_object("navigation_barrier_obs"),
context.world.scene.get_object("navigation_flip_station_obs"),
]
super().__init__(контекст, препятствия)
защита is_obstacle_required (я):
target_p, _ = self.context.robot.arm.target_prim.get_world_pose()
ref_p = np.array ([0,6, 0,37, -0,99])
eff_p = self.context.robot.arm.get_fk_p()
ref_p[2] = 0,0
eff_p[2] = 0,0
target_p[2] = 0,0
s_target = np.sign (np.cross (target_p, ref_p) [2])
s_eff = np.sign (np.cross (eff_p, ref_p) [2])
is_required = s_target * s_eff < 0,0
возврат is_required
FlipStationObstacleMonitor отслеживает flip_station_sphere , который является сферическим
препятствие вокруг флип-станции. Когда он активен, он будет активировать препятствие до тех пор, пока конечный эффектор не будет
опускаясь вдоль направления приближения его команды движения к цели позы. Монитор
используется, чтобы избежать флип-станции и корзины (опирающейся на станцию) после освобождения ее снизу
и двигаться, чтобы выбрать его сверху. Активируется при входе в
Монитор
используется, чтобы избежать флип-станции и корзины (опирающейся на станцию) после освобождения ее снизу
и двигаться, чтобы выбрать его сверху. Активируется при входе в Класс ReachToPick (используется любой
время, когда нужно забрать корзину, независимо от того, находится ли она на переворачивающей станции) и
деактивируется при выходе.
класс ReachToPick(MoveWithNavObs):
...
деф введите (я):
супер(). введите()
self.context.flip_station_obs_monitor.activate_autotoggle()
шаг определения (сам):
...
деф выход(сам):
супер (). выход ()
self.context.flip_station_obs_monitor.deactivate_autotoggle()
Аналогично, NavigationObstacleMonitor отслеживает совокупность препятствий, формирующих
поведение при навигации между поддоном и конвейером (в обоих направлениях), чтобы избежать базы робота и
текущий стек бункера в пути. Они нужны при переходе от одного к другому, но не нужны один раз
рука достигает области своего назначения (будь то поддон или конвейер).
Объект состояния MoveWithNavObs расширяет состояние Move с условиями входа и выхода, которые
автоматически переключать навигационное препятствие:
класс MoveWithNavObs(Move):
деф введите (я):
супер(). введите()
self.context.navigation_obs_monitor.activate_autotoggle()
деф выход(сам):
супер (). выход ()
self.context.navigation_obs_monitor.deactivate_autotoggle()
Этот класс является базовым классом как для состояния ReachToPick , так и для состояния ReachToPlace .
по PickBin и PlaceBin , указанным выше.
5.4. Надежность реактивность при размещении
Крепление бункера к рабочему органу и выравнивание бункеров при штабелировании физически
смоделированный. Простое слепое схватывание и перемещение корзины к цели без поправки на ошибки
привести к слегка смещенным контейнерам, которые не прилегают друг к другу должным образом. Так как мы используем
Генератор реактивного движения (RMPflow), реализация реактивных настроек проста. В
Так как мы используем
Генератор реактивного движения (RMPflow), реализация реактивных настроек проста. В ReachToPlace корректировки выполняются каждый цикл в методе step() :
класс ReachToPlace(MoveWithNavObs):
...
шаг определения (сам):
если self.bin_under не None:
bin_under_p, _ = self.bin_under.bin_obj.get_world_pose()
bin_grasped_p, _ = self.context.active_bin.bin_obj.get_world_pose()
xy_err = bin_under_p[:2] - bin_grasped_p[:2]
если np.linalg.norm(xy_err) < 0,02:
self.target_p[:2] += 0,1 * (bin_under_p[:2] - bin_grasped_p[:2])
target_pose = PosePq(self.target_p, math_util.matrix_to_quat(self.target_R))
подход_парамс = параметры подхода (направление = 0,15 * np.array ([0,0, 0,0, -1,0]), std_dev = 0,005)
posture_config = self.context.robot.default_config
self.update_command(
MotionCommand(target_pose=target_pose, append_params=approach_params, posture_config=position_config)
)
Если мы размещаем бункер поверх другого бункера ( bin_under ), этот код настраивает конечный эффектор
цель на основе ошибки выравнивания положения xy между бункером в захвате и бункером под
это. (Ориентального выравнивания обычно уже достаточно для успешного размещения.)
(Ориентального выравнивания обычно уже достаточно для успешного размещения.)
Кроме того, RMPflow настроен на получение обратной связи о реактивном состоянии от симулятора, и мы используем
параметры жесткого подхода для достижения цели ( std_dev=0.005 ), поэтому он должен следовать узкому
воронка на подходе. Если бункер сместится при первом подходе, физика бункера подтолкнет
конечный эффектор из этой воронки, и он снова попытается приблизиться.
В сочетании это заставляет робота реактивно регулировать положение корзины и повторять попытку подход (повторно, если необходимо), пока не получится правильно. Часто достаточно процесса регулировки, но периодически ему нужно повторить подход. Обычно достаточно одной повторной попытки. это тонкий поведение и код лаконичны, но это разница между примерно 85% успешных бинов размещение и 100% успех.
5.5. Контекст логического состояния
BinStackingContext дополнительно отслеживает все логическое состояние, необходимое для поддержки
выше поведения. Эти мониторы настраиваются в конструкторе, а логическое состояние
сброс/инициализация в методе
Эти мониторы настраиваются в конструкторе, а логическое состояние
сброс/инициализация в методе reset() :
класс BinStackingContext(ObstacleMonitorContext):
def __init__(я, робот):
супер().__инит__()
...
self.add_monitors(
[
BinStackingContext.monitor_bins,
BinStackingContext.monitor_active_bin,
BinStackingContext.monitor_active_bin_grasp_T,
BinStackingContext.monitor_active_bin_grasp_reached,
self.diagnostics_monitor.monitor,
]
)
сброс защиты (сам):
супер (). Сброс ()
# Найдите коллекцию мусорных ведер на мировой сцене.
self.bins = []
я = 0
пока верно:
имя = "bin_ {}". формат (я)
bin_obj = self.world.scene.get_object(имя)
если bin_obj равен None:
перерыв
self.bins.append(BinState(bin_obj))
я += 1
self.