Узлы регулирования – это готовые к подключению гидравлические системы регулирования тепловой мощности водяных нагревателей. – Узлы регулирования
Potencjometr z termostatem MANUAL (PL, EN,RU).pdf
control_optidrive_en.pdf
ATM-WING.pdf
cg_upc3_controls_en.pdf
control_modbus_LGiG5A_en.pdf
control_modbus_G100_en.pdf
control_modbus_M100_en.pdf
control_modbus_VS2000_EN. pdf
pdf
control_modbus_VTS5000_EN.pdf
control_modbus_VTS5000D_EN.pdf
Controller_VOLCANO_EC_documentation.pdf
Controller WING EC Documentation
Quick VENTUS assembly, wiring and commissioning instruction v1.2 (10.2022).pdf
Дренаж конденсата
Declaration_of_confirmity_ NVS_cooler ЕАС N RU Д-PL.АБ61.В.00319_19.pdf
Declaration_of_confirmity_VVS_VVSs_VVSc_ЕАС N RU Д-PL.
DEFENDER – tехнический паспорт
Door sensor.pdf
Door sensor adapter.pdf
DWG WING 150
DWG WING 200
DWG WING HOLDER 1000 mm
DWG WING HOLDER 1500 mm
DWG WING HOLDER 2000 mm
DWG WING 100
VOLCANO – Electrical Diagrams. pdf
pdf
Руководство по интеграции контроллера HMI для Modbus RTU (BMS).pdf
Holder set for WING.pdf
e_instrukcja_laczenia_sekcji.pdf
Montaz_dachu.pdf
EC_board_en.pdf
Ventus – Application uPC3 EN ver.1.9.pdf
HUMID_ROOM_RU.pdf
Щиты питания и управления для вытяжных агрегатов VS 21-650 CG 0-1
OMM_HE_SEC_ver 1. 8_(04.2023)_EN.pdf
8_(04.2023)_EN.pdf
CO2_EN_2.0.pdf
ventus_ahu_us_en.pdf
Руководство по запуску и эксплуатации VENTUS COMPACT VVS021c-VVS150c [EN]]
RRG_STEPMOTOR_EN.pdf
nvs_duct_ahu_pl.pdf
Installation, Operation and Maintenance Manual VENTUS PRO
Руководство по запуску и эксплуатации VENTUS – подвесные агрегаты VVS005s-VVS030s [EN]
ventus_ahu_en. pdf
pdf
EC_motor_en.pdf
OMM_wpg_oem_en.pdf
dtr_wpg_en.pdf
LG-G100-User-Manual-EN.pdf
Manual HMI VOLCANO HY WiFi (PL_EN_RU_DE).pdf
Documentation for HMI WING HY WiFi (PLENRUDE).pdf
Modbus RTU Manual
Modbus RTU Manual
New HMI Basic – VENTUS AHU
Manual HMI VOLCANO HY (PL_EN_RU_DE).
Manual HMI WING HY (PLENRUDE).pdf
New VOLCANO – Технический паспорт
OMM_HMI_TABLET_EN.pdf
Potentiometer_0_10V.pdf
DFF.PRESS.TRDC_EN.pdf
HUMID_EN_2.0.pdf
Thermostat Eh30.1
Thermostat Eh30.3
Thermostat VR.pdf
uPC3 – Diagram – v14.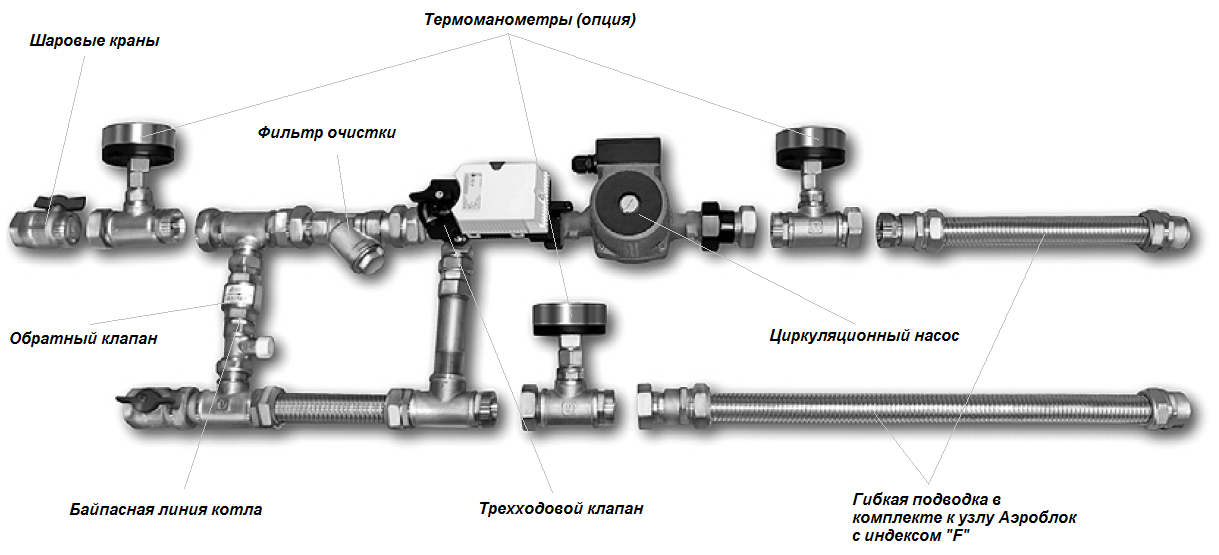 xlsx
xlsx
Инструкция пользователя – Руководство по визуализации – Контроллер uPC3 [RU]
VA-VEh302TA.pdf
VENTUS Compact – connecting instruction
VTS2000 communication Protocol.pdf
VTS5000 communication protocol.pdf
VTS5000D communication protocol.pdf
Rysunki DWG VR Mini.dwg
VOLCANO – Технический паспорт
VOLCANO VR 1-2 EC DWG
VOLCANO VR 3 EC DWG
VOLCANO VR Mini EC DWG
VTS2000_user_manual. pdf
pdf
VTS5000_user_manual.pdf
VTS5000D_user_manual.pdf
Hастенный контроллер WING VOLCANO
Manual – wall controller WING_VR ver. ENG.pdf
WING AC – Электрические схемы, системы управления
WING EC – Электрические схемы, системы управления
WING II – Технический паспорт
WING II AC – Электрические схемы
WING II EC – Электрические схемы
WING PRO – CE
WING PRO Technical documentation v5. pdf
pdf
WING PRO DWG
Декларация о соответствии Volcano VR-D mini EC-AC.pdf
консоль размеры VOLCANO.pdf
Обзор автобуса ПАЗ Vector Next 7.6 – [ Статья ] : ЯрКамп
Содержание статьи:
- Особенности внешнего вида и внутреннего пространства
- Преимущества салона ПАЗ 320405:
- Безопасность и технические характеристики ПАЗ 320405
- Модификации
Летом 2016 года стартовал серийный запуск нового и во многом революционного поколения автобусов малого класса от Павловского автомобильного завода, разработанного на прогрессивной платформе ГАЗон Next. ПАЗ Вектор Некст, дважды удостоенный престижной награды «Лучший автобус года», идеально подходит для езды на регулярных маршрутах малой и средней дальности с малым и средним пассажиропотоком.
Модель ПАЗ 320405 Вектор Next обладает привлекательным дизайном экстерьера и интерьера, высоким уровнем безопасности и соответствия требованиям стандарта EURO-5, современным техническим оснащением, а также комфортным вместительным салоном и эргономичным водительским местом. Модульная конструкция кузова позволяет оперативно создавать практичные модификации, способные справиться с различными задачами.
Особенности внешнего вида и внутреннего пространства
Главные особенности экстерьера Вектор Next 7.6:
- оригинальная передняя маска с увеличенной площадью остекления, позволяющей минимизировать границы слепых зон
- выразительные светодиодные блок-фары
- привлекательная радиаторная решетка
- парные прислонно-поворотные одностворчатые двери
- ассиметричные зеркала заднего вида
Модель вмещает до 53 пассажиров, имея от 17 до 25 посадочных мест. Производитель обрадовал салон с учетом комфорта людей разных пропорций. Таким образом, даже высокие пассажиры с удобством располагаются в положении стоя или сидя на креслах, не упираясь коленями в спинку впередистоящего кресла.
Таким образом, даже высокие пассажиры с удобством располагаются в положении стоя или сидя на креслах, не упираясь коленями в спинку впередистоящего кресла.
Преимущества салона ПАЗ 320405:
- использование современных материалов и комплектующих
- наличие широких дверных проемов
- эффективная изоляция от внешних шумов
высокий потолок - общая система поручней разной высоты
Производителем предусмотрен ряд дополнительных опций, среди которых несколько вариантов кресел, тонированные стеклопакеты, качественная система видеонаблюдения, удобные багажные полки, информативные электронные рейсоуказатели, улучшенное место водителя, а также раздельная система кондиционирования для пассажиров и водителя.
Безопасность и технические характеристики ПАЗ 320405
Модель имеет полунесущий среднепольный тип кузова вагонной компоновки, который облицован оцинкованными металлическими панелями, имея в конструкции элементы из стеклопластика. Внешние габариты автобуса в полной мере соответствуют требованиям малого класса: 7645х2445х2915 миллиметров. Благодаря небольшой базе радиус разворота составляет всего 7 метров. Снаряженная масса нового автобуса ПАЗ 320405-04 Вектор составляет 6650 килограмм, а максимально допустимая – чуть более 10 тонн.
Внешние габариты автобуса в полной мере соответствуют требованиям малого класса: 7645х2445х2915 миллиметров. Благодаря небольшой базе радиус разворота составляет всего 7 метров. Снаряженная масса нового автобуса ПАЗ 320405-04 Вектор составляет 6650 килограмм, а максимально допустимая – чуть более 10 тонн.
Интегрированный рулевой механизм ZF и телескопическая рулевая колонка (CSA) позволяют водителю беречь силы во время управления транспортным средством, а также обеспечивают необходимую четкость управления, избавляя от необходимости регулярного подруливания.
Для обеспечения безопасности водителя, пассажиров и других участников движения предусмотрено несколько прогрессивных решений:
- EBD – современная система распределения тормозных усилий
- ГЛОНАСС (опционально)
- ASR – электронная антипробуксовочная система
- система пожаротушения (опция)
- ESC – эффективная система курсовой устойчивости, предотвращающая занос транспорта во время поворотов (опционально)
Транспортное средство оснащается дизельным 4-цилиндровым двигателем ЯМЗ-534, оборудованный прогрессивной топливной системой Common Rail, который сопрягается с 6-ступенчатой АКПП Allison или 5-скоростной МКПП С40R13. Силовой узел, адаптированный к российскому топливу, уверенно запускается при низких температурах, а также обладает низким уровнем вибраций и шума.
Силовой узел, адаптированный к российскому топливу, уверенно запускается при низких температурах, а также обладает низким уровнем вибраций и шума.
Высокая маневренность и универсальность ПАЗ 320405 Vector Next обеспечены модернизированным шасси, в основе которого лежит надежная трансмиссия ГАЗ, сцепление с пневматическим гидроусилителем, система ABS, а также новейшая передняя ось с увеличенным углом поворота. Подвеска представлена комбинацией рессорной зависимой конструкции и зависимого пневморессорного аналога, оснащенного парой пневматических баллонов с системой автоматического регулирования давления.
Модификации
Унификация позволяет оптимизировать затраты на эксплуатацию, обеспечив достаточно ощутимую экономию денежных средств и, как следствие, быструю окупаемость автопарка. Каждая из существующих модификаций автобуса Вектор Некст оптимизирована для работы на городских, пригородных или междугородних маршрутах, с учетом их специфики и особенностей.
Помимо классической версии существует несколько модификаций Вектор Некст 7. 6:
6:
- Доступная среда – отличается наличием специальной накопительной площадки с оборудованным местом пассажиров с детскими колясками или маломобильных людей, а также наличием механической аппарели и заниженным уровнем пола в задней части;
- Междугородный – оснащается мягкими эргономичными креслами с откидными спинками, немецким кондиционером, багажным отделением и удобными полками, а также тонированными стеклами и системой аудиоподготовкой для проведения экскурсий;
- Школьный – салон оснащен мягкими креслами с 4-точеными ремнями безопасности и кнопкой связи с водителем (опционально доступна установка дополнительной выдвижной подножки).
В завершении обзора ПАЗ Вектор Некст следует упомянуть о таких преимуществах модели, как доступность запасных частей, стабильность, низкий расход топлива, значительный ресурс кузова (10 лет) и механических узлов, а также отличная управляемость и гарантированно длительный срок эксплуатации.
вложений узлов для начинающих.
 Встраивание узлов может быть сложным в… | Ив Бутелье Опубликовано в
Встраивание узлов может быть сложным в… | Ив Бутелье Опубликовано в·
10 минут чтения·
23 июля 2021 г.Впервые в университете я услышал о сетях на курсе по экологическим сетям. Этот курс многое прояснил для меня. Я хочу узнать о них больше и мечтаю о работе, на которой я буду работать с сетями. Но я ничего не знал о возможном машинном обучении на графах. Я решил взять на себя ответственность и поискать в Интернете бесплатные онлайн-курсы и настоящие сокровища.
Photo by Jouwen Wang on Unsplash Я нашел на YouTube этот бесплатный курс Стэнфордского университета, который преподает ведущий специалист в области графового машинного обучения Юре Лесковец. Название этого курса — «Машинное обучение с графиками». Эта и другие статьи, которые я собираюсь написать о графовом машинном обучении, — это мой способ включить эти новые знания, которые я получаю из этой серии. Если вы еще не прикасались к машинному обучению на основе графов, эта статья дает небольшое введение и поможет вам начать работу с его бесплатным курсом.
Поэтому я решил сделать эту часть очень вводной и продолжить эту статью более подробной информацией о том, что эта статья может дать вам. Итак, если вы чувствуете, что после прочтения этой статьи у вас растет желание получить больше знаний, вам следует ее прочитать. Надеюсь вам понравится.
Как и в случае с другими типами данных, мы хотим сделать выводы о лежащей в их основе информации, полученной из данных, полученных в реальном мире. Вот где машинное обучение вступает в игру.
Алгоритмы машинного обучения предоставляют нам модели, которые помогают нам понимать данные в наших сетях случаев, которых мы раньше не видели. Когда я говорю понимать сети, что я имею в виду?
Какие вопросы мы можем задать о сетях?
Давайте создадим пример сети и посмотрим, какой вопрос мы можем задать.
Социальная сеть, нарисованная автором Это социальная сеть. Каждый узел относится к человеку, и каждая ссылка или ребро означает, что два человека, связанные этим ребром, знают друг друга. Так, например, Джоанна знает Петра и Пьера, но не знает Марию.
Так, например, Джоанна знает Петра и Пьера, но не знает Марию.
Изучая эту сеть, мы можем задаться вопросом, почему Питер связан с Джоанной [1. т.е. принадлежат ли они к одной и той же группе (ярлыку)?] или возможно ли, что Петр также знает и Марию [2.]. Или у Винсента и Джоанны похожие роли в социальных сетях [3.] ?
Сводка возможных вопросов (не исчерпывающая)
- Предсказание признака узла (метки/группы) на основе предположения о гомофилии
- Предсказание связи
- Предсказание признака узла (роли)
Давайте сделаем шаг назад и вспомним, как мы отвечаем на вопросы с другими типами данных. Я привожу краткое изложение возможных проблем и подходов только для ознакомления с общей схемой решения проблем.
Линейная регрессия
Если мы хотим предсказать цену дома, мы собираем атрибуты или признаки и помещаем их в вектор. Этот вектор, умноженный на вес/наклон и добавление точки пересечения, дает нам необходимый прогноз цены. Вектор имеет одинаковые характеристики для каждого дома, и вначале определяется порядок этих характеристик. Таким образом, первая запись всегда описывает, например, почтовый индекс, вторая — возраст здания и так далее. Идея о том, что функции всегда занимают одно и то же положение, естественна, и большинство из нас, имеющих опыт работы с данными / машинным обучением, не задумывались об этом.
Вектор имеет одинаковые характеристики для каждого дома, и вначале определяется порядок этих характеристик. Таким образом, первая запись всегда описывает, например, почтовый индекс, вторая — возраст здания и так далее. Идея о том, что функции всегда занимают одно и то же положение, естественна, и большинство из нас, имеющих опыт работы с данными / машинным обучением, не задумывались об этом.
CNN
Если мы хотим классифицировать изображения, мы можем выбрать сверточные нейронные сети (CNN). Изображения в основном представляют собой массивы/матрицы значений пикселей. Алгоритм CNN классифицирует изображение на основе этих значений. Весь массив преобразуется в несколько этапов для сохранения важной информации (какой пиксель имеет какое значение и как это значение соотносится с соседними значениями) и, наконец, передается в полносвязную нейронную сеть для взвешивания взаимосвязей между пикселями. Но самое главное в контексте этой статьи — опять же, природа упорядочения. У каждого изображения есть верх и низ, лево и право. Таким образом, прежде чем массив (или, точнее, массивы с накоплением (тензор)) будет передан в полносвязную нейронную сеть, значения пикселей помещаются в вектор. Это разворачивается для каждой картинки одинаково, благодаря естественному упорядочению картинок.
У каждого изображения есть верх и низ, лево и право. Таким образом, прежде чем массив (или, точнее, массивы с накоплением (тензор)) будет передан в полносвязную нейронную сеть, значения пикселей помещаются в вектор. Это разворачивается для каждой картинки одинаково, благодаря естественному упорядочению картинок.
RNN
Во всех разновидностях рекуррентных нейронных сетей (RNN) мы передаем векторы, которые отражают измерения/значения из временного ряда или последовательности. Каждый вход имеет одинаковую форму, и сеть изучает отношения между точными элементами этой формы и предсказывает будущие значения.
by authorВозвращаясь к этим трем примерам и возвращаясь к всеобъемлющему принципу этих проблем, мы можем заключить, что необходимо иметь некоторую форму вектора, однозначно описывающего источник данных, будь то дом, изображение или последовательность. Кроме того, примеры показывают, что данные должны лежать в основе некоторого порядка.
gif от автора Графики не имеют естественного порядка или точки отсчета. Таким образом, не существует ни верха, ни низа, ни левого и правого. Это отличается от типа данных, которые мы можем объяснить с помощью линейной регрессии, CNN или RNN. Картинка состоит из правильной решетки. РНС изучают последовательности хорошо упорядоченных векторов. Даже произвольные объекты, такие как дом, можно абстрактно описать вектором, даже если он не полностью отражает реальность.
Таким образом, не существует ни верха, ни низа, ни левого и правого. Это отличается от типа данных, которые мы можем объяснить с помощью линейной регрессии, CNN или RNN. Картинка состоит из правильной решетки. РНС изучают последовательности хорошо упорядоченных векторов. Даже произвольные объекты, такие как дом, можно абстрактно описать вектором, даже если он не полностью отражает реальность.
Но любая попытка подсчета через сеть и создание матрицы не приводит к обобщению закономерностей в сетях. Поскольку матрицы смежности для данного графа не уникальны.
графы не имеют уникальных матриц смежности, авторНо мы все же хотим делать выводы о графах
Тем не менее, нам нужна процедура, которая возвращает вектор для графа, узла или ребра. К счастью, эти процедуры уже изобретены. В оставшейся части статьи я сосредоточусь на встраивании узлов, но аналогичные подходы работают для целых графов или ребер.
Нахождение вектора для узла возможно с изучением представления узла..jpg) Результатом обучения такому представлению является встраивание узлов (также существует встраивание графов, встраивание ребер). Поэтому я буду использовать термины «представление» и «встраивание» как синонимы.
Результатом обучения такому представлению является встраивание узлов (также существует встраивание графов, встраивание ребер). Поэтому я буду использовать термины «представление» и «встраивание» как синонимы.
Но каким правилам должны подчиняться вложения узлов, чтобы сделать вывод?
Вложения должны отражать топологию графа, взаимосвязи между узлами и дополнительную соответствующую информацию. Как вложения должны фиксировать эту неотъемлемую информацию графа, не установлено. Это зависит от вопросов, которые мы задаем о сети.
Встраивание должно фиксировать топологию графа, отношения между узлами и дополнительную информацию. Как мы собираемся понять это, чтобы у нас была четкая процедура?
Возможное решение этой проблемы состоит в том, чтобы попытаться сформировать вложения таким образом, чтобы вложения двух узлов были похожи в каком-то смысле, если они имеют некоторое сходство в реальной сети. Каким бы ни было это сходство, решать нам.
Мы можем решить формировать вложения по принципу подобия. Узлы, которые похожи в сети, будут иметь аналогичные вложения.
Если мы вернемся к вводному примеру сети, где у нас есть социальная сеть, и мы хотим распределить разных людей по группам (это был один из возможных вопросов), мы можем попытаться сформировать вложения, которые помогут нам в этом. Одна концепция, которая оказалась полезной, называется гомофилией. Было обнаружено, что во многих реальных сетях гомофилия является организующим принципом, особенно в социальных сетях. Тем не менее, мы хотим объединить людей, которые проводят время вместе.
Фото Bùi Thanh Tâm на Unsplash💡 Таким образом, векторное представление Джоанны должно быть похоже на векторное представление Питера, поскольку они являются соседями. — Гомофилия
Еще раз обратите внимание, что это верно только в том случае, если мы изучаем представление признаков, которое следует эвристической концепции гомофилии. Другой возможной концепцией, которую исследователи считают организующим принципом, является понятие структурной эквивалентности. Концентратор подключен к мостам и/или листьям.
Другой возможной концепцией, которую исследователи считают организующим принципом, является понятие структурной эквивалентности. Концентратор подключен к мостам и/или листьям.
💡 Таким образом, векторное представление Джоанны должно быть похоже на векторное представление Винсента, поскольку они играют одинаковую роль в своих группах сверстников. — Структурная эквивалентность
Чтобы вам было предельно ясно, я нарисовал два сценария. Слева вы видите вложение, которое было бы результатом чистой гомофильной организации, а справа — если бы оно было организовано только за счет структурной эквивалентности. Я схематично нарисовал 2D-проекцию пространства вложений, поскольку именно так обычно визуально оцениваются пространства вложений.
График встраивания после уменьшения размерности /w напр. t-SNE, автор Обратите внимание, что, например, значения встраивания для Джоанны и Пьера действительно похожи, если сходство основано на гомофилии, но сильно различаются, если оно основано на структурной эквивалентности. Это Винсент, который имеет такое же вложение, что и Джоанна, поскольку оба они соединяют группу одноранговых узлов в виде прямоугольника с группой одноранговых узлов в виде треугольника.
Это Винсент, который имеет такое же вложение, что и Джоанна, поскольку оба они соединяют группу одноранговых узлов в виде прямоугольника с группой одноранговых узлов в виде треугольника.
Тем не менее, большинство алгоритмов позволяют этому разворачиваться без присмотра, сети могут быть структурированы на основе неизвестных нам принципов. Помните, что мы хотим зафиксировать топологию сети и отношения внутри этой сети. Поэтому чаще всего репрезентация не должна полностью следовать гомофилии или структурной эквивалентности. Однако исследования показали, что эти принципы организации существуют в реальных сетях, поэтому разумно предположить, что встраивание включает их.
В другой моей статье, в которой более подробно рассказывается о вложениях узлов, вы можете увидеть, что алгоритму node2vec удалось иметь общее понятие сходства для достижения вложений узлов, которые могли бы следовать либо концепции гомофилии, либо концепции структурной эквивалентности. или сочетание того и другого, в то время как Deepwalk, «предшественник» node2vec, был более ограниченным и, следовательно, менее мощным в своем применении.
Рисунок 3 из node2vec, Grover et al, 2016, показывающий совместное появление персонажей в les misérablesСходство узлов в node2vec и deepwalk зависит от совпадения узлов в случайных блужданиях.
На этом рисунке выше из статьи node2vec мы видим, что они пометили узлы после кластеризации и группировки узлов во встраивании пространства без присмотра (алгоритму не были известны группы). Полностью гомофилия привела к шести группам (вверху), полностью структурная эквивалентность привела к трем группам (внизу).
Подводя итог тому, что мы узнали в этой главе, теперь мы знаем, что хотим формировать вложения таким образом, чтобы они отражали информацию, поступающую из сети. Чтобы приблизиться к этой неясной цели, мы ввели понятие подобия. Мы коснулись идеи гомофилии и структурной эквивалентности, но узнали, что существует сложная смесь обоих и других принципов организации.
Для начала мы должны выбрать размер нашего пространства для встраивания. Например, в node2vec с сетью les misérables они решили внедрить сеть в 16 измерениях. Затем, поскольку у нас нет исходной гипотезы о том, как пространство встраивания будет выглядеть в конце (без присмотра — мы не используем никаких меток или чего-либо еще), мы инициализируем вложения случайным образом. Поэтому мы проводим репрезентативное обучение, которое за пару итераций приводит к хорошему встраиванию, отражающему топологию сети.
Например, в node2vec с сетью les misérables они решили внедрить сеть в 16 измерениях. Затем, поскольку у нас нет исходной гипотезы о том, как пространство встраивания будет выглядеть в конце (без присмотра — мы не используем никаких меток или чего-либо еще), мы инициализируем вложения случайным образом. Поэтому мы проводим репрезентативное обучение, которое за пару итераций приводит к хорошему встраиванию, отражающему топологию сети.
При обучении представлению мы следуем нашей цели, для которой ранее построили интуицию. Мы как-то измеряем сходство в сети между двумя узлами, сравниваем его со сходством в пространстве вложений. Если сходство в пространстве вложений между двумя узлами не отражает сходства в сети, мы вносим коррективы в вложения.
Я намеренно опустил детали репрезентативного обучения, так как эта статья посвящена развитию сильной интуиции.
Суммировать
- решить, насколько велико пространство для встраивания
- случайным образом инициализировать вложения для каждого узла/графа/ребра
- изучение вложений путем многократного постепенного улучшения вложений таким образом, чтобы это отражало сходство в сети
(3-й step — это цикл. )
)
Если наш алгоритм изучил встраивание, мы можем использовать векторизованные данные, чтобы получить представление о сети. Это достигается с помощью известных инструментов машинного обучения. Например, мы можем формировать неконтролируемые группы в этом пространстве вложений с кластеризацией k-средних.
Доказательство того, что вложения, основанные на алгоритме, приводят к представлению графа, показано на изображении ниже из статьи о дипволке. Вложения справа отражают группы, которые являются частью сети слева.
Deepwalk, Perozzi et al 2014, рис. 1 Вы узнали, какие вопросы мы можем задать о сетях с точки зрения машинного обучения/науки о данных. Но вы видели, что подходы, которые применяются к другим распространенным типам данных, таким как изображения или последовательности, не работают. Однако вы узнали, что встраивание узлов или более общих графов может быть первым шагом к решению проблем машинного обучения на графах. Мы ввели понятие подобия, которое должно помочь получить вложения. Если у нас есть встраивание, вы видели, как исходные данные графа можно преобразовать в приложения ML.
Если у нас есть встраивание, вы видели, как исходные данные графа можно преобразовать в приложения ML.
[1] Grover, Leskovec, node2vec, 2016
[2] Perozzi et al, deepwalk, 2014
[3] машинное обучение для графов — курс YouTube из Стэнфорда онлайн https://www.youtube.com/watch ?v=3IS7UhNMQ3U&list=PLoROMvodv4rPLKxIpqhjhPgdQy7imNkDn&index=4
Раскраска графа с помощью networkx
Решение проблемы раскраски графа концептуально простое, но эффективное в своем применении. В этом руководстве показано…
в направлении datascience.com
циклов движка рендеринга. В настоящее время узел координат текстуры не работает из-за векторного смещения?
В конце я добавил небольшое дополнение.
Я столкнулся с процедурным смещением векторов с помощью шейдерных узлов в Cycles. На днях я создал модель и попытался анимировать ее вращение в пространстве (без использования векторных преобразований в самом шейдере) только для того, чтобы обнаружить, что она испортила координаты текстуры, которые я использовал. Это странно для меня, так как я использовал сгенерированные координаты, преобразованные для соответствия координатам объекта. Я полагал, что сгенерированные координаты были в локальном пространстве и должны позволить мне вращать исходную сетку так, как я хочу, применяя это преобразование к смещению. Ну, по какой-то причине глобальная трансформация изменила форму локального смещения и исказила объект.
Это странно для меня, так как я использовал сгенерированные координаты, преобразованные для соответствия координатам объекта. Я полагал, что сгенерированные координаты были в локальном пространстве и должны позволить мне вращать исходную сетку так, как я хочу, применяя это преобразование к смещению. Ну, по какой-то причине глобальная трансформация изменила форму локального смещения и исказила объект.
Попробовав несколько вещей, таких как использование координат объекта и не обнаружив никаких изменений в результатах, я провел небольшое исследование и не нашел абсолютно ничего, относящегося к этой проблеме. Я подумал, что, может быть, я просто ошибся в своих математических расчетах и где-то ссылался на глобальные координаты, и я просто случайно сделал эту ошибку во всех трех своих экспериментальных проектах. Чтобы быть уверенным, я скопировал учебник CGMatter по астероидам точно так, как он это сделал, в той же сборке Blender, насколько это было возможно. Та же проблема. Продукт выглядел хорошо, но простое переворачивание модели вверх ногами вернуло ее к форме исходного меша (проект начинается с разделенного куба и заканчивается совсем другим видом астероида).
Затем я попытался полностью переустановить Blender. Это было после обновления за несколько дней до этого, поэтому я действительно хотел убедиться, что с моей стороны ничего не сломалось. Это тоже не сработало. Это означает, что это либо ошибка, либо я тупой на данный момент. У меня нет уверенности сказать, что это ошибка, поэтому я был бы признателен, если бы кто-нибудь мог просмотреть быстрый проект, который я создал с той же проблемой, и обучить меня путям узла Координата текстуры. Если я правильно интерпретировал его функцию, и это ошибка, я действительно отправлю отчет.
В этом проекте я использую старое смещение куба-в-пирамиду. Если исходный меш вращается вокруг X или Y, кажется, что он инвертирует некоторые или все локальные координаты (если объект перевернут, да, он должен инвертировать наблюдаемые координаты, но локальные не должны меняться!). Если источник вращается вокруг Z, основание вращается в направлении, противоположном вершине. Самое странное для меня то, что если вы посмотрите на используемые координаты, применяя их к выходным данным шейдера, они отображаются правильно, но выполняемая математика, похоже, не использует это преобразование таким же образом.
Вот изображение установки узла:
Опять же, я мог упустить что-то очевидное, но я чувствую, что это должно работать в локальном пространстве объектов независимо от ориентации исходного меша, поскольку преобразование в локальное пространство всегда будет возвращать одни и те же векторы положения. Верх куба всегда должен быть сплющен, даже если он направлен вниз, потому что локально он всегда является вершиной.
В любом случае, извините за ОЧЕНЬ длинный пост, я просто понятия не имею, что происходит, и хотел добавить как можно больше контекста. Вот короткое видео, как я возился с объектом и точный файл проекта из видео:
Видео с YouTube
Скачать проект
В последний раз спасибо всем, кто прошел через это!
БЫСТРОЕ ДОПОЛНЕНИЕ: Итак, я не совсем понял, в какой части проблемы. Это не то, как я должен циклически переключаться между режимами рендеринга в редакторе, чтобы что-то обновить до глобального преобразования. У меня вообще не было бы никаких проблем, но когда я делаю окончательный рендеринг, он обновляет каждый кадр и превращает локальное смещение в странное наполовину локальное, наполовину глобальное смещение.